2011’s Real Steel may have vanished from the public consciousness in a remarkably short amount of time, but the concept was pretty neat. There is something exciting about the idea of fighting through motion-controlled humanoid robots. That is completely possible today — it would just be wildly expensive at the scale seen in the movie. But MPuma […]
2011’s Real Steel may have vanished from the public consciousness in a remarkably short amount of time, but the concept was pretty neat. There is something exciting about the idea of fighting through motion-controlled humanoid robots. That is completely possible today — it would just be wildly expensive at the scale seen in the movie. But MPuma made it affordable by scaling the concept down to Rock ‘Em Sock ‘Em Robots.
The original Rock ‘Em Sock ‘Em Robots toy was purely mechanical, with the players controlling their respective robots through linkages. In this project, MPuma modernized the toy with servo motors controlled via player motion.
As designed, the motion-controlled robot has three servo motors: one for the torso rotation, one for the shoulder, and one for the elbow. If desired, the builder can equip both robots in that manner. An Arduino UNO Rev3 board controls those motors, making them match the player’s movement.
The Arduino detects player movement through three potentiometers — one for each servo motor. Twisting the elbow potentiometer will, for example, cause the robot’s elbow servo motor to move by the same angle. That arrangement is very responsive, because analog potentiometer readings are quick. It is, therefore, suitable for combat.
The final piece of the puzzle is attaching the potentiometers to the player’s body. MPuma didn’t bother with anything complicated or fancy, they just mounted the potentiometers to pieces of cardboard and strapped those to the player’s arm.
This may not be as cinematic as Real Steel’s robots, but you can recreate MPuma’s project for less than you spent to see that movie in theaters.
Robotic vehicles can have a wide variety of drive mechanisms that range from a simple tricycle setup all the way to crawling legs. Alex Le’s project leverages the reliability of LEGO blocks with the customizability of 3D-printed pieces to create a highly mobile omnidirectional robot called Swervebot, which is controllable over Wi-Fi thanks to an Arduino […]
Robotic vehicles can have a wide variety of drive mechanisms that range from a simple tricycle setup all the way to crawling legs. Alex Le’s project leverages the reliability of LEGO blocks with the customizability of 3D-printed pieces to create a highly mobile omnidirectional robot called Swervebot, which is controllable over Wi-Fi thanks to an Arduino Nano ESP32.
The base mechanism of a co-axial swerve drive robot is a swerve module that uses one axle + motor to spin the wheel and another axle + motor to turn it. When combined with several other swerve modules in a single chassis, the Swervebot is able to perform very complex maneuvers such as spinning while moving in a particular direction. For each of these modules, a pair of DC motors were mounted into custom, LEGO-compatible enclosures and attached to a series of gears for transferring their motion into the wheels. Once assembled into a 2×2 layout, Le moved onto the next steps of wiring and programming the robot.
The Nano ESP32 is attached to two TB6612 motor drivers and a screen for displaying fun, animated eyes while the robot is in-motion or idling. Controlling the swerve bot is easy too, as the ESP32 hosts a webpage full of buttons and other inputs for setting speeds and directions.
If your car was made in the last decade, its dash probably has several displays, gauges, and indicator lights. But how many of those do you actually look at on a regular basis? Likely only one or two, like the speedometer and gas gauge. Knowing that, John Sutley embraced minimalism to use a Game Boy […]
If your car was made in the last decade, its dash probably has several displays, gauges, and indicator lights. But how many of those do you actually look at on a regular basis? Likely only one or two, like the speedometer and gas gauge. Knowing that, John Sutley embraced minimalism to use a Game Boy as the dash for his car.
Unlike most modern video game consoles, which load assets into memory before using them, the original Nintendo Game Boy used a more direct tie between the console and the game cartridge. They shared memory, with the Game Boy accessing the cartridge’s ROM chip at the times necessary to load just enough of the game to continue. That access was relatively fast, which helped to compensate for the small amount of available system RAM.
Sutley’s hack works by updating the data in a custom “cartridge’s” equivalent of ROM (which is rewritable in this case, and therefore not actually read-only). When the Game Boy updates the running “game,” it will display the data it sees on the “ROM.” Sutley just needed a way to update that data with information from the car, such as speed.
The car in question is a second-generation Hyundai Sante Fe. Like all vehicles available in the US after 1998, it has an OBDII port and Sutley was able to tap into that to access the CAN bus that the car uses to send data between different systems. That data includes pertinent information, such as speed.
Sutley used an Arduino paired with a CAN shield to sniff and parse that data. The Arduino then writes to the “ROM” with whatever Sutley wants to display on the Game Boy’s screen, such as speed.
This is, of course, a remarkably poor dash. The original Game Boy didn’t even have a backlight for the screen, so this would be downright unsafe at night. But we can all agree that it is very cool.
A vehicle’s wheel diameter has a dramatic effect on several aspects of performance. The most obvious is gearing, with larger wheels increasing the ultimate gear ratio — though transmission and transfer case gearing can counteract that. But wheel size also affects mobility over terrain, which is why Gourav Moger and Huseyin Atakan Varol’s prototype mobile […]
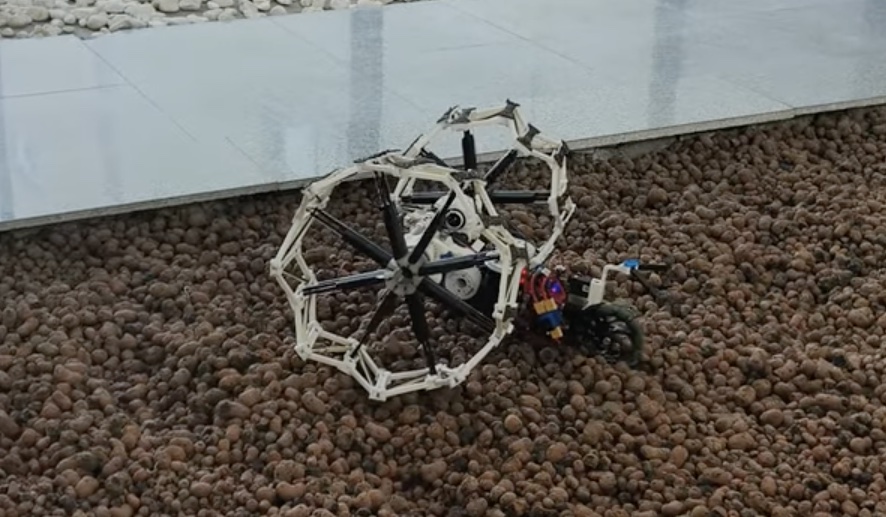
A vehicle’s wheel diameter has a dramatic effect on several aspects of performance. The most obvious is gearing, with larger wheels increasing the ultimate gear ratio — though transmission and transfer case gearing can counteract that. But wheel size also affects mobility over terrain, which is why Gourav Moger and Huseyin Atakan Varol’s prototype mobile robot, called Improbability Roller, has the ability to dynamically alter its wheel diameter.
If all else were equal (including final gear ratio), smaller wheels would be better, because they result in less unsprung mass. But that would only be true in a hypothetical world on perfectly flat surfaces. As the terrain becomes more irregular, larger wheels become more practical. Stairs are an extreme example and only a vehicle with very large wheels can climb stairs.
Most vehicles sacrifice either efficiency or capability through wheel size, but this robot doesn’t have to. Each of its wheels is a unique collapsing mechanism that can expand or shrink as necessary to alter the effective rolling diameter. Pulley rope actuators on each wheel, driven by Dynamixel geared motors by an Arduino Mega 2560 board through a Dynamixel shield, perform that change. A single drive motor spins the wheels through a rigid gear set mounted on the axles, and a third omni wheel provides stability.
This unique arrangement has additional benefits beyond terrain accommodation. The robot can, for instance, shrink its wheels in order to fit through tight spaces. It can also increase the size of one wheel, relative to the other, to turn without a dedicated steering rack or differential drive system.
Basic drones are very affordable these days—you can literally find some for less than the cost of a fast food drive-thru meal. But that doesn’t mean drones are easy to control. That is actually quite difficult, but manufacturers are able to work off of established reference designs. In a video that perfectly illustrates the difficulty, […]
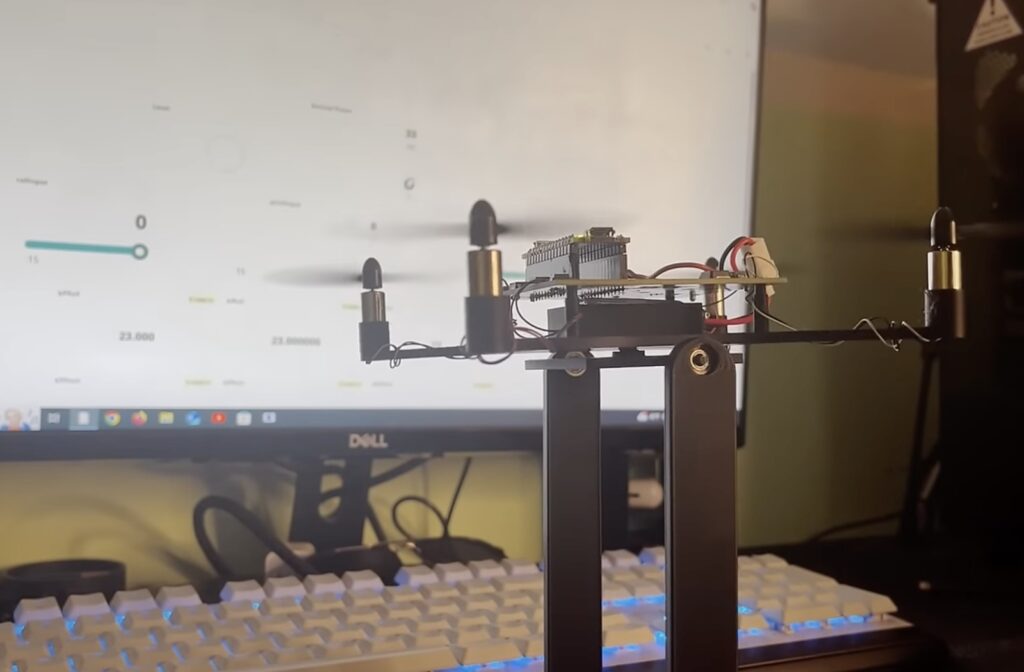
Basic drones are very affordable these days—you can literally find some for less than the cost of a fast food drive-thru meal. But that doesn’t mean drones are easy to control. That is actually quite difficult, but manufacturers are able to work off of established reference designs. In a video that perfectly illustrates the difficulty, The Tinkering Techie attempted to make a supercapacitor-powered drone with his own custom flight controller.
Most airplane designs have inherent aerodynamic stability. Even without power, they can continue to glide. Even helicopters have some inherent stability in the form of autorotation. Quadrotor drones do not—they need constant power and very frequent motor control updates just to stay aloft. Even the slightest control error will result in catastrophic failure. Despite knowing the challenge, The Tinkering Techie wanted to try making his own flight controller.
Aside from the custom flight controller, this drone is also unique for its power storage. Instead of conventional lithium batteries, it has a bank of supercapacitors. Those can fully charge in seconds—though they don’t store energy well over long periods of time.
The job of the flight controller is directing power from the supercapacitors to the motors (brushed DC motors, in this case) in a very precise manner. An Arduino Nano 33 IoT board oversees that process and The Tinkering Techie chose it because it has onboard sensors useful for a quadcopter, including a gyroscope and an accelerometer. A custom PCB hosts the Arduino and the supercapacitors, while a simple 3D-printed frame ties everything together.
Unfortunately, this isn’t a success story and The Tinker Techie ultimately failed to achieve stable flight. The are many potential reasons for that, but one of the most glaring was the use of brushed DC motors, which can’t respond as fast as brushless DC motors can — an important factor for a drone.
Managing your IoT data just got a whole lot easier — Arduino Cloud, now lets you send your time series data straight to AWS S3. With this seamless connection, organizing and analyzing your data is a breeze. In case you don’t know, Arduino Cloud is a robust, integrated platform that simplifies the development and lifecycle […]
Managing your IoT data just got a whole lot easier — Arduino Cloud, now lets you send your time series data straight to AWS S3. With this seamless connection, organizing and analyzing your data is a breeze.
In case you don’t know, Arduino Cloud is a robust, integrated platform that simplifies the development and lifecycle management of IoT and industrial products at scale. Today, we’re very excited to share its integration with AWS S3 storage.
If you’re familiar with the AWS ecosystem and you’ve started using Arduino Cloud, you can now extract time series data and publish it directly to Amazon S3 buckets. This new feature uses AWS’s scalable storage system and helps you access, manage, and analyze your IoT data easily.
You can now extract data at scheduled intervals, aggregate, and store it in CSV files within S3; which is a huge step to connect your Arduino devices with your current AWS setup. This functionality is available to all users on premium Arduino Cloud plans that support API access: Entry, Maker, Maker Plus, School and Business, . Whether you’re tracking environmental data from a smart garden or monitoring industrial equipment, the AWS S3 integration provides a straightforward way to manage large datasets.
Check out this Github link to learn how to extract time series samples from Arduino cloud and publish them to a AWS S3 destination bucket.
Seamless experience with AWS Marketplace
The new S3 integration feature is even more powerful when combined with the availability of Arduino Cloud licenses on the AWS Marketplace. By purchasing licenses through AWS, there is no need for separate billing platforms, you benefit from unified billing. This makes it easier to manage subscriptions and simplify accounting, especially for organizations that are s already using AWS. They can get started with Arduino Cloud without the hassle of separate billing platforms. You can learn more about it here.
With this new AWS S3 integration, Arduino Cloud keeps growing its ecosystem. This makes it easier for developers to create and expand IoT solutions.
Get started with the new AWS S3 and Marketplace integration
With the new AWS integrations, you can:
Take control of your IoT data with our new AWS S3 integration. Check out the documentation to learn more details.
Simplify your billing by purchasing Arduino Cloud licenses directly through the AWS Marketplace. Explore the available plans on our AWS Marketplace listing.
This is just the beginning. We’re also adding support for AWS IoT SiteWise, bringing even more capabilities to your IoT projects. Stay updated by following the Arduino blog.
If you have questions or need support, visit our contact page. We’re here to help you get the most out of Arduino Cloud. Get started today!
Launching today at CES 2025, the Arduino Pro Portenta Proto Kit is here to revolutionize how professionals approach prototyping. Designed to empower engineers, designers, and innovators from all walks of life, this kit provides everything you need to turn your ideas into functional prototypes quickly, efficiently, and without conventional limitations. Available in two variants – […]
Launching today at CES 2025, the Arduino Pro Portenta Proto Kit is here to revolutionize how professionals approach prototyping. Designed to empower engineers, designers, and innovators from all walks of life, this kit provides everything you need to turn your ideas into functional prototypes quickly, efficiently, and without conventional limitations.
Available in two variants – Portenta Proto Kit ME (Motion Environment) and VE (Vision Environment, available later this month) – the kit equips you with advanced tools to tackle any challenge, from environmental sensing to machine vision to vibration detection, accelerating the prototyping phase from weeks to days and days to hours. Whether you’re developing predictive maintenance systems or high-speed test rigs, the flexible and comprehensive Portenta Proto Kit has you covered.
What’s inside the Portenta Proto Kit?
At the heart of the kit is the powerful Portenta H7, paired with the versatile Portenta Mid Carrier. These components support advanced processing and edge machine learning, ensuring your prototypes are as future-ready as they are functional.
The kit also includes the full set of our innovative Modulino nodes for rapid sensing and actuation, 4G GNSS Module Global for connectivity, and an Arduino Cloud for BusinessVoucher for your first three months of seamless cloud integration – so you can store, display, and analyze data remotely.
Depending on your chosen configuration, you’ll also find everything you need for motion, vision, and environmental sensing in one kit:
Nicla Vision and Nicla Sense Env for machine vision and environmental monitoring (Vision Environment variant)
Nicla Sense ME for motion detection and predictive maintenance (Motion Environment variant)
You’ll easily integrate all of these hardware tools with the new Proto Shield included, and leverage the Arduino IDE on the software side to develop quick, scalable, IoT-enabled prototypes.
Go from concept to reality in a wide range of applications
The Arduino Pro Portenta Proto Kit is suitable for many industries and countless applications: the kit’s modular design means you can tailor your prototypes to meet specific requirements, ensuring your projects are always on track. What’s more, you’ll often be able to transition from prototyping to production with no redesigns required.
Here are some ideas you could explore:
Predictive maintenance: reduce downtime and monitor machinery health, using advanced Nicla sensors and cloud-based predictive algorithms.
Environmental monitoring: precisely track air quality, noise, and other parameters for real-time decision-making.
Machine vision: implement object recognition, motion detection, and people counting using Nicla Vision.
Logistics tracking: monitor goods in transit with environmental data and cloud-enabled location tracking.
Intruder detection: use motion and face recognition for security monitoring, with cloud-based real-time alerts.
EV charging station: create a prototype for efficient, remotely managed charging with data analytics.
High-speed test rigs: build scalable test benches for automated sensor calibration, load testing, and real-time data analysis.
As always, we are curious to find out what the Arduino professional community will come up with next!
Learn and innovate with the ACE-220 course
Ready to hit the ground running? Enroll in ACE-220: Portenta Proto Kit Certification Course on Arduino Academy. This eight-hour professional program is designed to provide embedded engineers, hardware designers, and firmware developers with hands-on modules that cover everything from hardware and software setup to cloud integration. By dedicating a few hours to the ACE-220 course, you’ll gain the expertise to leverage the kit’s capabilities fully, saving significant time and effort in your prototyping process and accelerating your path to innovation.
Get started on your greatest idea now!
Whether you’re building the next big thing in automation, smart cities, or IoT, the Arduino Pro Portenta Proto Kit offers the tools to make it happen. Explore the full kit online and take the first step toward redefining what’s possible in prototyping.
Known by their characteristic mounting solution, Dobsonian telescopes are the standard in amateur astronomy due to their lower cost and ease-of-use. But after seeing how some of the larger, motorized telescopes at observatories can simply pivot to a target of interest, one member from the FabLab at Orange Digital Center Morocco wanted to add this functionality to […]
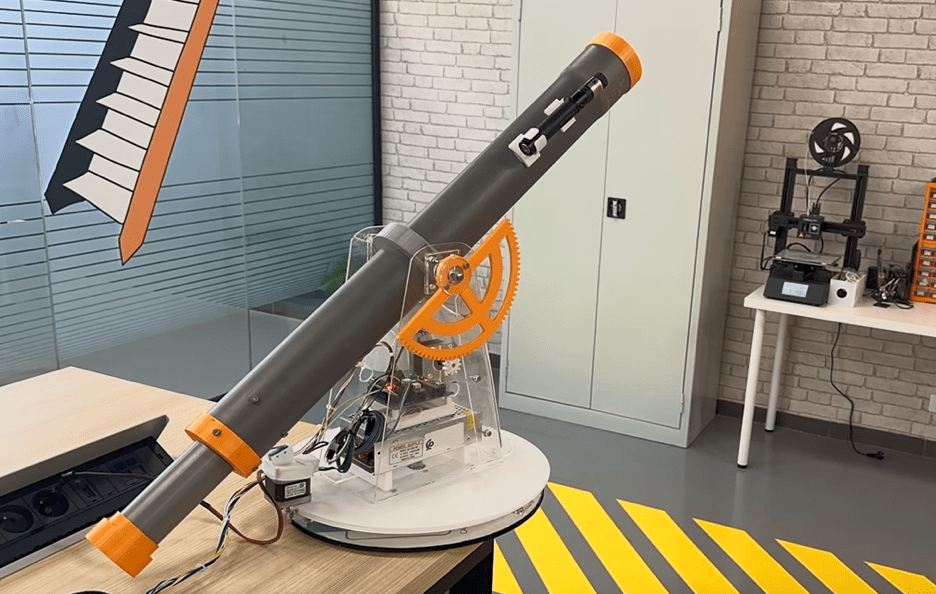
Known by their characteristic mounting solution, Dobsonian telescopes are the standard in amateur astronomy due to their lower cost and ease-of-use. But after seeing how some of the larger, motorized telescopes at observatories can simply pivot to a target of interest, one member from the FabLab at Orange Digital Center Morocco wanted to add this functionality to his own hobbyist telescope.
The base of the telescope guidance system was made by cutting a large disk from a sheet of plexiglass on a laser cutter and then wrapping it in a timing belt for setting the azimuth (yaw). Once mounted, a 3D-printed set of gears, along with some bearings, were attached to one side in order to provide the altitude adjustments. Each axis is moved by a single stepper motor and accompanying A4988 stepper driver, and both plug into an Arduino Nano.
Over on the controls side of the project, an interface was added that gives the user two buttons, an analog joystick, and an LCD screen at the top. With it, they can select between three different modes. In offline mode, locations that have been preloaded into the other Nano can be chosen as the target, while any arbitrary location can be sent via serial from a host PC in online mode. Finally, the joystick can be used in manual mode to move anywhere.
Every decent stereo sold since the invention of sound has included a knob on the front for adjusting volume. There are influencers and entire communities dedicated to evaluating the feel of those wonderful knobs. So why would you settle for the mushy volume buttons on a remote? Eric Tischer didn’t think he should have to, […]
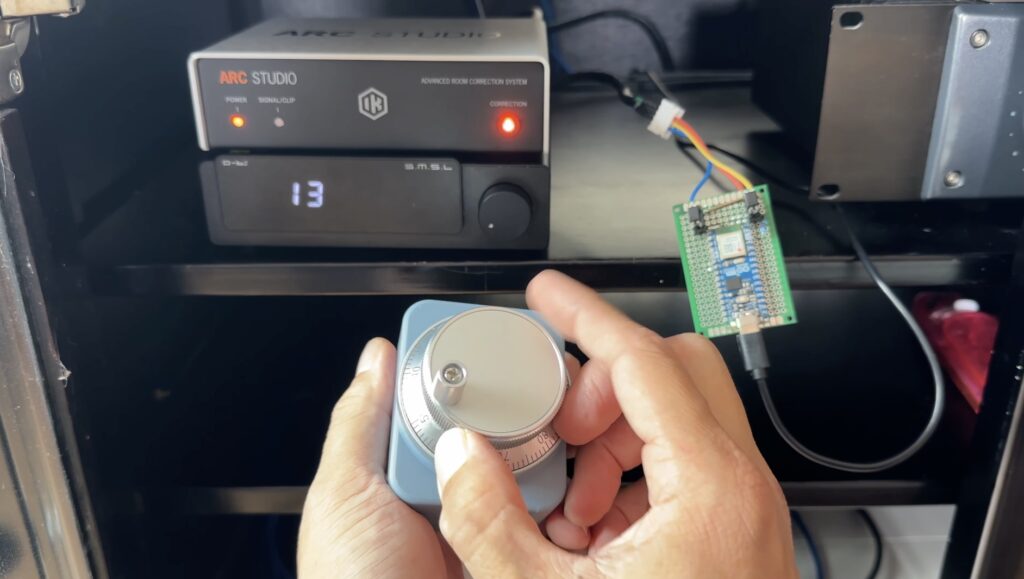
Every decent stereo sold since the invention of sound has included a knob on the front for adjusting volume. There are influencers and entire communities dedicated to evaluating the feel of those wonderful knobs. So why would you settle for the mushy volume buttons on a remote? Eric Tischer didn’t think he should have to, so he built his own wireless rotary encoder device for controlling his DAC’s volume.
A digital-to-analog converter (DAC) is an important part of modern digital audio systems. Tischer’s DAC/preamp takes the digital signal from a TV or other device, turns it into an analog signal, and then pushes that out to an amplifier. The DAC has a rotary encoder on the device itself for adjusting volume, but the remote just has the standard buttons. Tischer measured that remote and found that it takes 25 seconds to go from zero to full volume. That’s almost as annoying as the horribly unsatisfying buttons.
Tisher’s solution was to construct a new wireless remote with only one job: controlling volume. It has a big CNC jog-wheel style rotary encoder that reportedly has a very nice feel, with 100 total detent “clicks” per revolution. That matches perfectly with the number of volume levels.
An Arduino Nano ESP32 board monitors the remote rotary encoder and communicates the detected position (via pulse-counting) to another ESP32 board by the DAC over ESP-NOW. That second board attaches to the DAC’s built-in rotary encoder pins and simulates pulses that match the remote. So as far as the DAC knows, Tischer is rotating the built-in encoder. In reality, he’s sitting comfortably on the couch spinning that handheld knob instead of pushing buttons dozens of times per commercial break.
Autonomous vehicles, and self-driving cars in particular, are probably one of the most enticing technologies of the 21st century. But despite a great deal of R&D and even more speculation, we have yet to see a self-driving car that can actually operate on real public roads without any human oversight at all. If, however, we […]
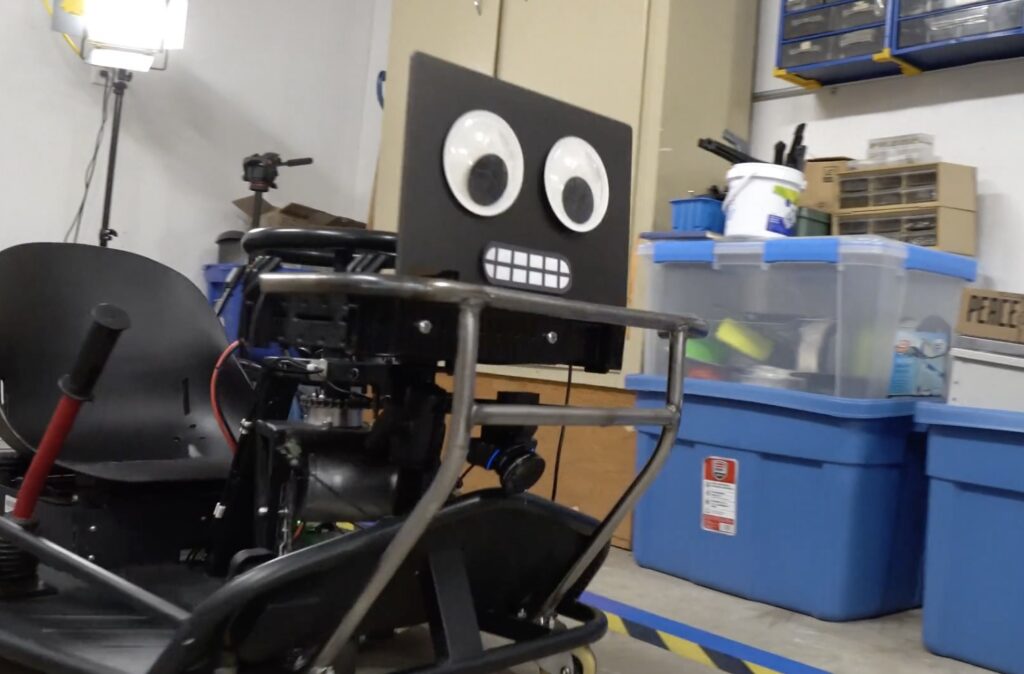
Autonomous vehicles, and self-driving cars in particular, are probably one of the most enticing technologies of the 21st century. But despite a great deal of R&D and even more speculation, we have yet to see a self-driving car that can actually operate on real public roads without any human oversight at all. If, however, we remove that “real public roads” constraint, the challenge becomes a lot more approachable. All you need is a few Arduino boards and a webcam, as proven by Austin Blake’s self-driving go-kart.
Blake previously attempted a miniature self-driving Tesla project, which was supposed to drive around a park walking path. That was only a partial success, because the vehicle struggled to put its “behavioral cloning” machine learning algorithms into practice. Blake took those lessons and applied them here, with much better results.
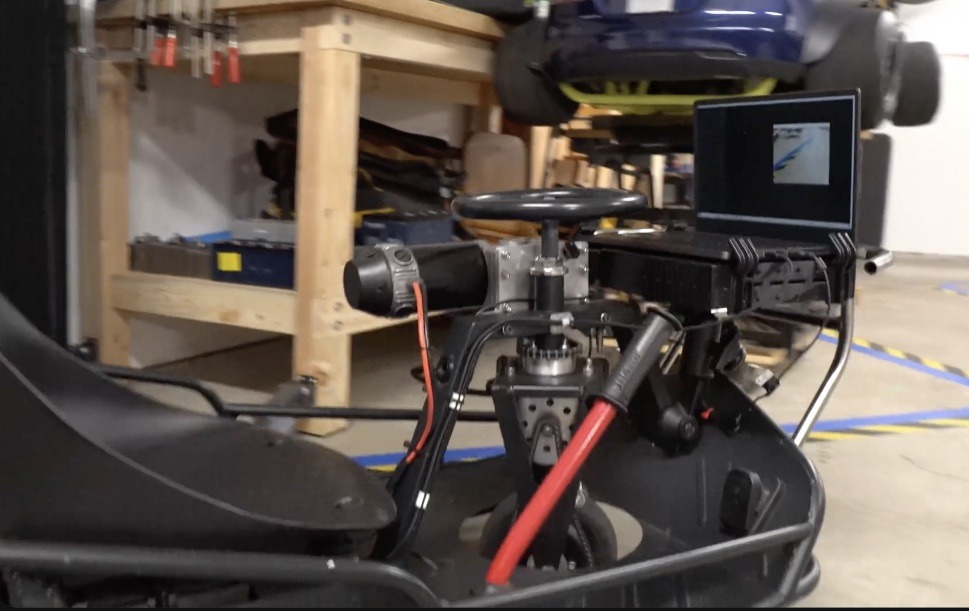
Behavioral cloning, in this context, means that the machine learning algorithm watches what Blake does as he drives around the track, then attempts to replicate that while driving on its own. During training, it looks ahead of the kart through a webcam while monitoring the steering angle. Then, while driving on its own, it looks through the webcam at the track and tries to match the steering angle to what it saw during training.
The machine learning model runs on a laptop, but Blake needed a way for it to control the kart’s steering and throttle. He used three Arduino Nano boards to pull that off. The first just listens to the machine learning model’s serial output for a PWM signal representing the steering angle. It then sends that to the second, which uses that information and the real-time steering angle to control a Cytron motor driver for the steering. The third controls the throttle using an RC car-style circuit.
This proved to work quite well and the go-kart can navigate around a small track in Blake’s workshop. In theory, it could also handle new tracks — so long as they have similar clearly marked edges.